
Dr.-Ing. Ali Montazeri
Kontakt
Dynamische Programmierung ist ein mathematisches Optimierungsverfahren, welches sich mit Problemen befasst, in denen stufenweise Entscheidungen zu treffen sind. In diesem Forschungsthema wird ein zeitdiskretes Zustandsmodell zusammen mit der dynamischen Programmierung mit finitem Horizont eingesetzt. Dies verwendet ein rekursives analytisches Vorgehen, um die beste Entscheidungsreihenfolge zu finden.
Forschungsziele
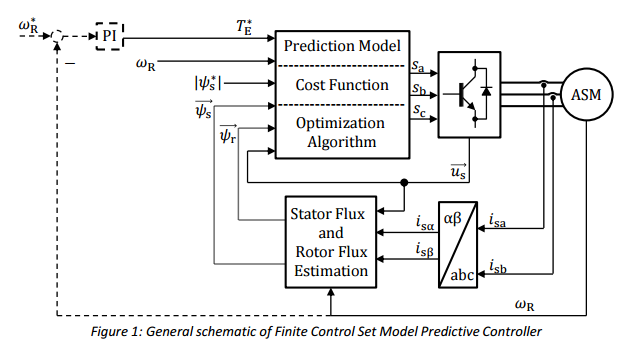
Das Hauptziel dieses Forschungsvorhabens ist es, ein FCS-MPC basierend auf dynamischer Programmierung zu entwickeln, welcher die dynamische Leistungsfähigkeit der Asynchronmaschine im Vergleich zu klassischen Regelungsverfahren weiter verbessert und dabei die Schalt- und Durchlassverluste des Umrichters reduziert. Die Optimierung der Statorfluss Trajektorien im stationären und dynamischen Betrieb, um Kupfer- und Eisenverluste in der elektrischen Maschine zu reduzieren, ist ebenfalls ein Ziel der Forschung.
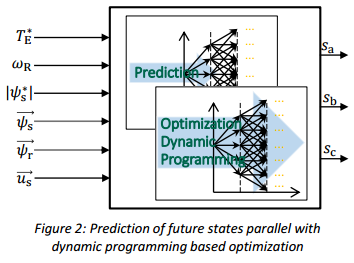
Weiterhin wird untersucht, wie dynamische Programmierung (als Optimierungsverfahren) parallel mit Prädiktion implementiert werden können. Dies soll den exponentiellen Anstieg der Prädiktionsaufwand mit ansteigende Prädiktionshorizont vermeiden (Abbildung 2). Dadurch wird die Implementierung höherer Prädiktionshorizonte auf Standard Rechnersystemen für die Antriebsregelung möglich. Ein Kompromiss zwischen Länge des Prädiktionshorizontes und realisierbarer Implementierung auf Rechnersystemen ist zu finden.
Eine System On Chip (SoC) Plattform, auf der sowohl Processing System (Mikrocontroller) als auch programmierbare Logik (FPGA) vorhanden sind, kann als ein ideales Rechnersystem für MPC Regler dienen, da die parallele Rechenfähigkeit des FPGAs perfekt für das parallele Rechnen der Prädiktion eingesetzt werden kann.
Projekt Partner
Dieses Thema ist durch Deutsche Forschungsgemeinschaft finanziert.